機械手臂協作 造船業邁大步
2023/09/28 | By 經濟日報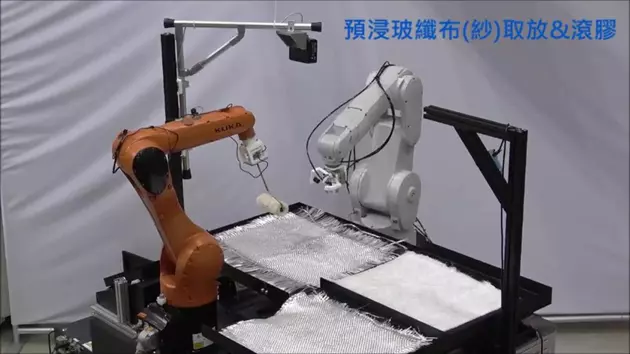
技術演進與智慧化趨勢下,工業機器手臂費用逐年遞減,使用愈趨普及。目前工業機器手臂主要應用在上下料取放、銲接及組配,市占約占近七成,其他還有如金屬鑽孔、切割、去毛邊、拋光等加工應用。機器手臂可適應彈性化生產,並具取代大量重複性勞力工作。不過,目前市面上機器手臂作業物件須具備標準性及剛性,如在銲接時因機器手臂是固定路徑動作,非標準的工件可能導致氣孔及咬邊(undercut)使品質不良;若進行線材插銷組裝,因柔性的線材在組裝過程中會產生形變,造成手臂無法定位,工作流程就容易中斷,這也是機器手臂的痛點。
舉例來說,以常見6噸工作船需使用超過3噸重的玻璃纖維布(簡稱玻纖布)用於強化船體,玻纖布由數公里長的玻纖股及紗複合材料組成,以積層製造方式依需求裁切大小並層層堆疊藉此賦予其強度、剛度與耐用性,根據船體受力結構需製作四層至七層不等的玻纖布。堆疊過程中,玻纖股及紗需相互對位疊放並進行沾膠滾壓,讓樹酯膠充分滲透纖維(又稱玻纖布預浸布製作)。
然在當前手積製程裁切後尺寸變化達10至20毫米,每物件的大小不一,此外,膠合材質用的固化膠體濃稠度也會隨時間變化有所差異,加工物件完全不符合機器手臂導入所必備的標準化及剛性工件的先天條件。為使機器手臂進一步操作非標準性與柔性工件,經濟部技術處以智慧機器人製造科專計畫,支持金屬中心機器人柔性材料加工技術,為造船業提供自動化生產解決方案。
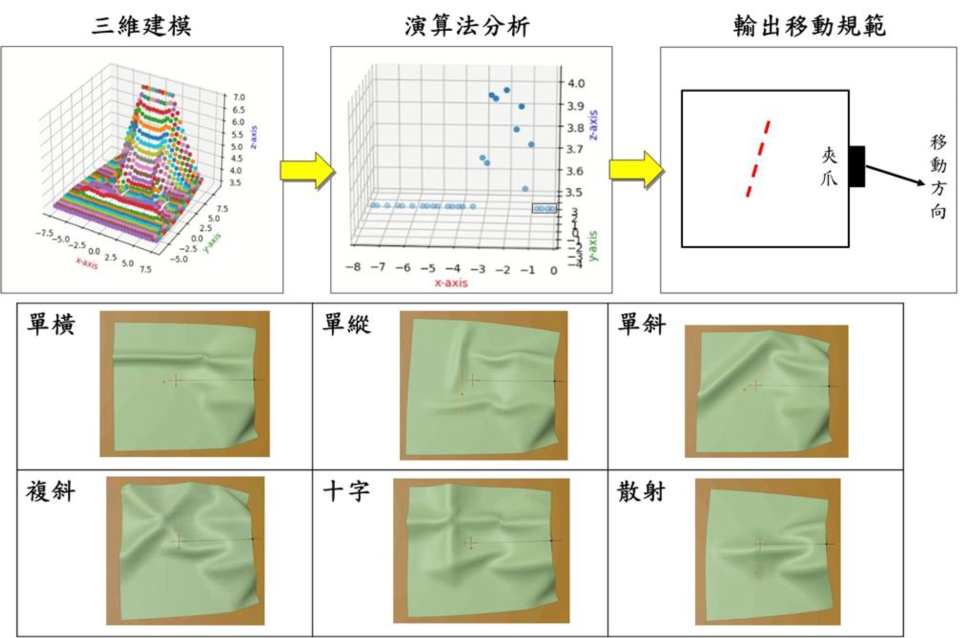
藉由科技專案資源,金屬中心在深度學習及數位孿生的智慧化相關技術基礎下,使用負壓原理設計了手臂末端的取放工具,成功地抓取透氣玻纖布,再以視覺導引手臂完成除皺對位路徑,克服取放過程中可能產生玻纖布形變。並建立柔性變形對位滾膠等協作模組,經由物理引擎模擬環境下進行資訊擷取及學習,智慧化生成手臂滾膠路徑,人機共同協作,人員只需在手臂無法滾膠的範圍內,共同進行滾壓及協助玻纖邊緣處進行補膠動作。
此外,機械手臂裝載安全皮膚感測,當人員碰撞下會自動停機,避免人機協作時可能發生危險。使手臂與人員共同協作,省力完成玻纖積層生產,創造更友善的工作環境。
藉由虛實整合技術縮短演算法學習時間,解決人工作業容易產生差異的問題,應用在6噸工作船製造上,可有效節省耗膠量、船體重量減少8%以上、增加額外載貨量達500公斤,將來可衍生應用在巡航艦等輕量化船身,提高整體速度及續航力。
金屬中心開發台灣首款紗股取放滾膠雙門型手臂生產單元,解決傳統產業人力缺口及3K生產問題(3K指的是危險、辛苦、骯髒)。藉由機器人次系統控制器(RCC)視覺功能套件進行強化學習,藉以生成玻纖布取放路徑,解決柔性變形問題,如影像處理、主從訊的架構完成雙手臂協作任務等,數位化股紗材料及滾膠使用量亦可優化製程參數,降低滾膠成本8%以上、提升產能30%,預計每年提高產值新台幣2,000萬元,協助台灣造船遊艇業者跨入智慧製造第一步。
(作者是經濟部技術處智慧機器人與製造應用AI系統開發計畫/柔性材料機器人加工系統技術計畫主持人與成員)